













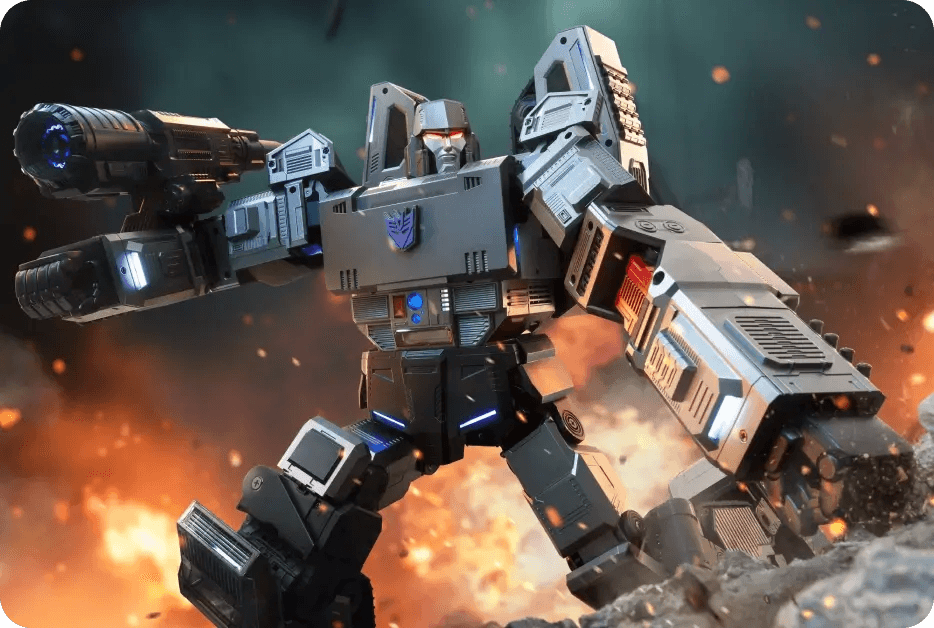
Since the release of Flagship Optimus Prime, it has welcomed its old rival, Megatron! As a commemorative design for Hasbro's 40th anniversary, what's new about Megatron?
Self-developed high-precision chip and intelligent joints
This "Megatron" is packed with over 4500 parts throughout, including 36 self-developed high-precision intelligent joints. It utilizes 118 microchips for algorithm-driven motion control, employs a six-axis attitude sensor, making it capable of stable, flexible movements.

Complex motions and convertions
For robots, the servos driving each joint are the most critical components. A robot's mobility or the speed, stability, and accuracy of its actions depend on the performance of servos. After all, servos (or more commonly known as motors) act as both "muscles" and "joints" for robots. They need to drive every segment of the body to move (dynamic balance), and they must also have sufficient mechanical strength to support different postures of the robot (static stability).
The more servos, the more moveable joints, and the possibility for the robot to make more complex movements and achieve more delicate conversions. However, more servos naturally increase the aesthetic requirements for robot structure and the mechanical strength of the servos themselves.
In comparison with ordinary humanoid robots, "automatic conversion" is the main feature of Megatron. This means that all of its servos must be able to operate both in "tank mode" and "human mode". Some servos may be used to drive the robot to "walk" in human mode, but in tank mode, they must be used to drive the movement of the vehicle.
This not only makes Megatron's internal mechanical structure much more complex, but it also requires the development of specific high-performance servos that are not only small in size but also possess high torque to move its massive body.
Apart from performance, other factors need to be considered for the servos, including the structural design of the external shell materials, rational planning of the conversion process, sequence, and physical factors like friction resistance and shift of the center of gravity.

High reduction and high performance
Since Megatron is an IP collaboration product, this means that engineers and designers must ensure the appearance is highly restored while embedding the servos that support each joint's movement into its body. Consequently, many servos must be redesigned in terms of appearance and size to accommodate Megatron's own body proportions. Simultaneously, the redesigned servos bring about changes in performance, and whether they can provide sufficient kinetic energy and support for the robot becomes an attached technical "paradox."
In terms of the robot's conversion motion algorithm and gait algorithm, considering that Megatron itself is larger, heavier, and has many more joints, this means that when it "moves," especially when it walks on two legs, almost all the servos throughout the body need to be continuously adjusted to maintain the balance of the center of gravity during the robot's "step" process.
Obviously, this requires dozens of servos and their driving algorithms to cooperate closely, and more importantly, enough sensors inside the robot need to continuously detect the center of gravity, friction force, angle, and other data.
{kind=link}
Leave a comment
This site is protected by hCaptcha and the hCaptcha Privacy Policy and Terms of Service apply.